How Does It Know Where to Go?
- ZAPT
- Oct 8, 2021
- 4 min read
Updated: May 2, 2023

Welcome to Zupt Autonomous Products and Technology Introduction to Commercial Autonomous Mowing series. In the last blog, we introduced you to our safety story and introduced the safety features built into Nomad. This week we will help you understand how Nomad knows where it is and how it works. In the future, you can expect to see Stories from our Engineers and Stories from the Field as part of additional Blog series.
Nomad mows within a defined boundary. In Nomad’s case, this boundary can be invisible to the human eye but very “visible” or “known” to the mower. We define the area to be mowed as an area within a “polygon.” A quick refresher - a polygon is a plane figure described by a finite number of straight-line segments connected to form a closed polygonal chain or an area with multiple sides that connect to close the area.
We define the primary area as mowed as an “outer bounding polygon” (OBP). In many cases within the OBP, there are obstructions, such as flower beds or ponds, etc., that are defined as “no go” areas or “inner obstruction polygons” (IOP). Think about a commercial company’s contract with a large HOA, there are multiple areas (outer polygons) that need to be mowed within the sub-division, and within these areas, there are all the “no go” or areas not to mow.
Our planning process has three methods for defining the mowing boundary and associated go/no-go polygons:
We initially use boundary data from processed satellite/airborne imagery. This data is commercially available and is already used in the commercial landscape industry for developing accurate proposals based on areas to be serviced. It is also extensively used in the commercial roofing sector for determining roof areas for ease of quoting.
We can also use data from a high-resolution survey-grade LiDAR mapping system, either mounted to a vehicle or possibly mounted onto an airborne drone.
We always use data collected with our LiDAR and camera-based systems on Nomad for autonomous positioning of the mower. If no satellite or survey data is available, we can always collect this data during our first mow on-site using Nomad under radio control.

LiDAR stands for Light Detection and Ranging, and it is a sensing method that uses light in the form of a pulsed laser to measure ranges (variable distances) to what it can see. The LiDAR systems we use spin through 360 degrees and have multiple channels or lines of light.
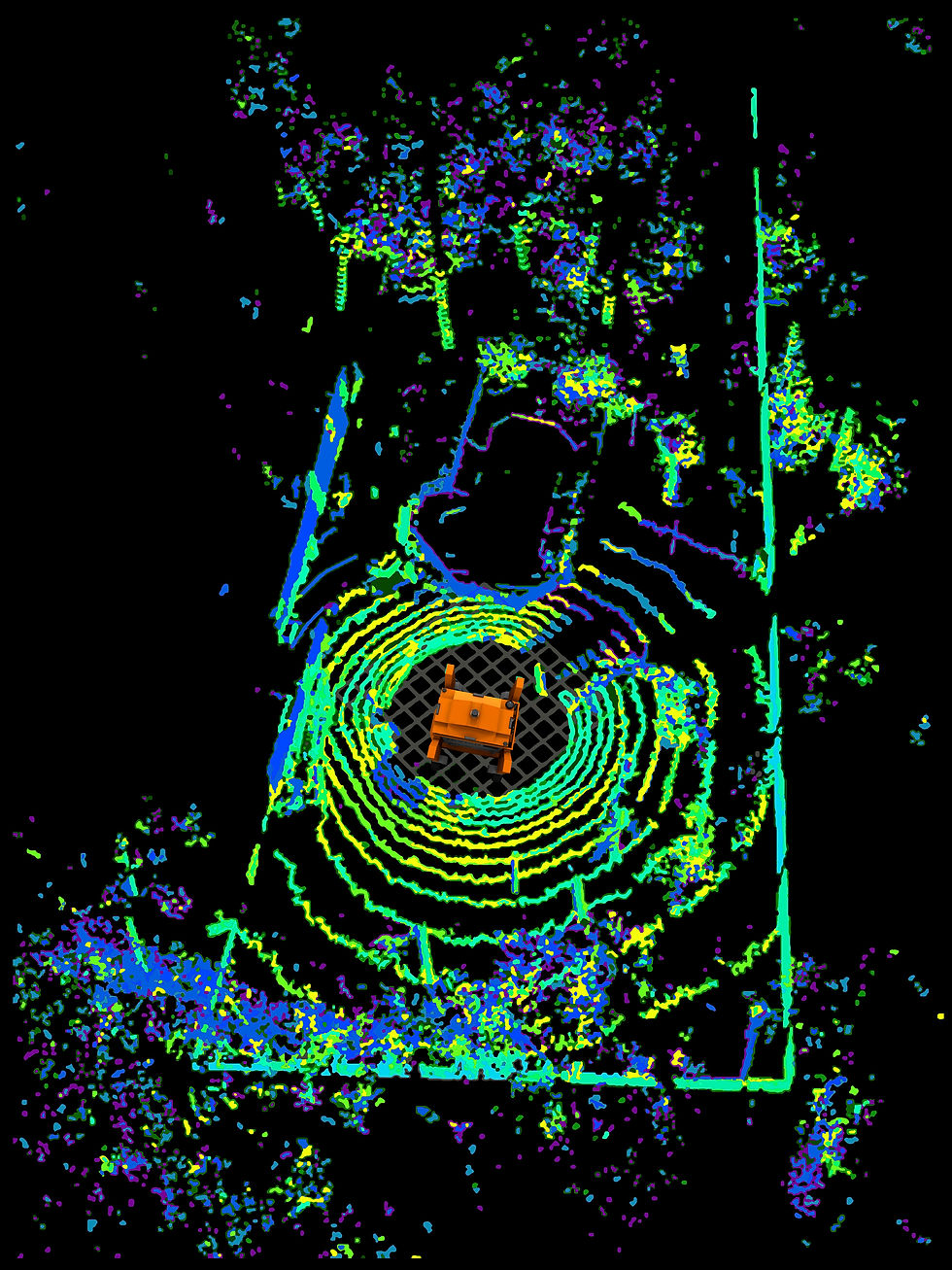
The result is an accurately scaled map and a very clear picture of what is around Nomad as it through an area to be mowed.
But – how does it know where the boundary is?
We use boundaries defined within an earth-referenced coordinate reference system (CRS). This may sound complicated, but we position the boundaries (or edges of the polygons) in the same coordinate reference system as GPS (we use the term GNSS – defined below). As we are all used to looking at our phones to get directions in an unfamiliar area, we do the same with a special version of GPS or GNSS.
GNSS – today, we have many satellites circling the earth to provide positioning and time information than just the US Global Positioning System (GPS) shown above. GPS is fully serviceable with 24 satellite vehicles (SVs) within its constellation. The Russians have a similar system called GLONASS; this system also has 24 SVs within its constellation. Galileo is the European system deployed to provide a satellite-based positioning system. Galileo has 30 SVs within its constellation. Additionally, China now has a satellite positioning system, BeiDou, with 35 SVs in orbit. These systems can all be tracked on Earth with a single multi-channel receiver and a single multi-band antenna. The reliability and accuracy available from combining all these systems are significantly better than just using any one.
Coordinate Reference Systems (CRS) - GPS uses the World Geodetic System WGS-84 coordinate reference system. The US Department of Defense originally developed this, and the US National Geospatial-Intelligence Agency now maintains it. GLONASS uses the PZ-90 CRS, Galileo uses GTRF and BeiDou uses the BeiDou Coordinate System (BDC). A known separation or conversion between all these reference systems exists such that the outputs from each system can be delivered within a single reference frame – we use WGS-84.
If you have ever looked at the satellite view in Google Maps or Google Earth, you can define a boundary and export this information in a specific format known as “Keyhole Markup Language” (KML). Or, if this data is extensive and zipped, the extension is KMZ. We use the same format to define the boundaries within Nomad’s brain – so these boundaries can be easily viewed and verified within Google Earth/Maps.

Simply put, Nomad knows precisely where it is on the earth’s surface, it recognizes that it has a defined polygon in its “Brain” for that area, and it knows where it is in relation to that polygon based on the GNSS data. Once you move into that polygon and ask it to move, the imagery from LiDAR and stereo cameras will provide constant feedback to support the GNSS position. Nomad knows where it is in the polygon and will respect the no-go zones and any perceived unknowns in the mowing area.
Our next Intro to Autonomous Mowing blog will build on this positioning knowledge and explore how Nomad uses precise location knowledge and unique mechanical features to optimize mow paths.
Comments